Ṣe alabapin si Awọn media Awujọ wa fun ifiweranṣẹ kiakia
Ní àkókò ìlọsíwájú ìmọ̀ ẹ̀rọ tó ń gbilẹ̀, àwọn ètò ìlọsíwájú farahàn gẹ́gẹ́ bí àwọn òpó ìpìlẹ̀, tí ó ń darí ọ̀pọ̀lọpọ̀ ìlọsíwájú, pàápàá jùlọ ní àwọn ẹ̀ka pàtàkì tí ó ṣe pàtàkì. Ìrìn láti ìlọsíwájú ọ̀run dé àwọn ètò ìlọsíwájú Inertial Navigation Systems (INS) tí ó ní ìlọ́síwájú ṣe àfihàn àwọn ìsapá àìfaradà aráyé fún ìwádìí àti pípe ìpéye. Ìwádìí yìí ṣe àgbéyẹ̀wò jinlẹ̀ sínú àwọn ẹ̀rọ ìṣiṣẹ́ INS, ó ń ṣe àwárí ìmọ̀ ẹ̀rọ tuntun ti Fiber Optic Gyroscopes (FOGs) àti ipa pàtàkì ti Polarization nínú Mímú Àwọn Okùn Lops.
Apá 1: Ṣíṣe àtúnṣe sí Àwọn Ètò Ìlọsíwájú Inertial (INS):
Àwọn Ètò Ìtọ́sọ́nà Inertial (INS) yàtọ̀ sí àwọn olùrànlọ́wọ́ ìtọ́sọ́nà aládàáni, tí wọ́n ń ṣírò ipò, ìtọ́sọ́nà, àti iyàrá ọkọ̀, láìsí àwọn àmì ìta. Àwọn Ètò wọ̀nyí ń mú kí ìṣípo àti àwọn sensọ̀ yíyípo bára mu, wọ́n sì ń dara pọ̀ mọ́ àwọn àwòṣe ìṣirò fún iyàrá àkọ́kọ́, ipò, àti ìtọ́sọ́nà.
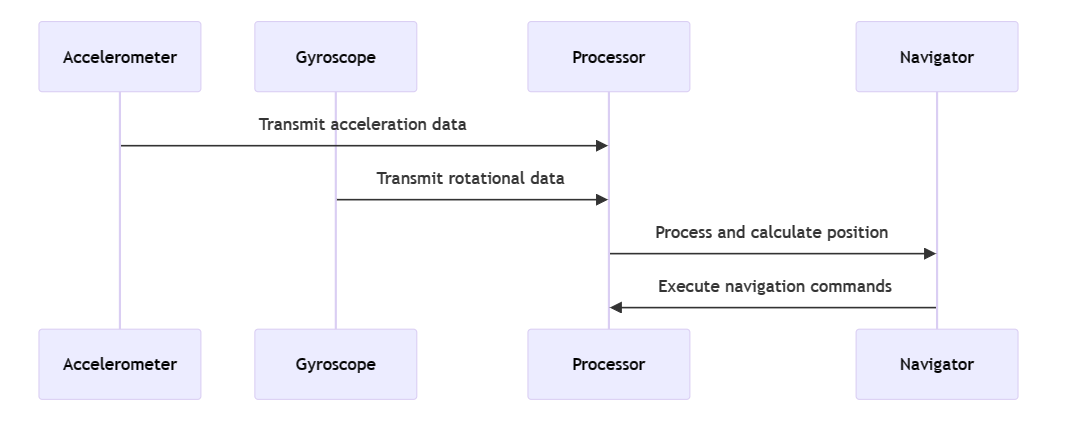
INS archetypal kan ni awọn ẹya pataki mẹta:
· Àwọn ohun èlò ìfàsẹ́yìn: Àwọn ohun pàtàkì wọ̀nyí ń fi ìfàsẹ́yìn ìlà ọkọ̀ sílẹ̀, wọ́n sì ń túmọ̀ ìṣíṣẹ́ sí ìwádìí tí a lè wọ̀n.
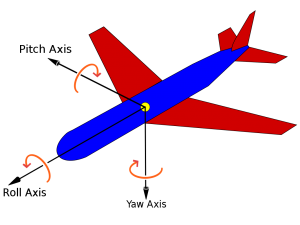
· Àwọn Gyroscopes: Àpapọ̀ fún pípinnu iyàrá ìgun, àwọn ẹ̀yà ara wọ̀nyí ṣe pàtàkì fún ìtọ́sọ́nà ètò.
· Módùùlù Kọ̀mpútà: Àárín iṣan ara ti INS, tí ó ń ṣe àgbékalẹ̀ àwọn dátà onípele púpọ̀ láti mú àwọn àgbékalẹ̀ ìṣàyẹ̀wò ipò gidi jáde.
Ààbò ara INS sí ìdènà láti òde mú kí ó ṣe pàtàkì ní àwọn ẹ̀ka ààbò. Síbẹ̀síbẹ̀, ó ń kojú “ìfàsẹ́yìn” - ìbàjẹ́ díẹ̀díẹ̀, tí ó nílò àwọn ojútùú onípele bíi ìdàpọ̀ sensọ̀ fún ìdínkù àṣìṣe (Chatfield, 1997).
Apá 2. Ìṣiṣẹ́ Ìṣiṣẹ́ ti Gyroscope Optic Fiber:
Àwọn ohun èlò ìṣàpẹẹrẹ okùn (FOGs) ń ṣe àfihàn àkókò ìyípadà nínú ìmọ̀ ìyípo, wọ́n sì ń lo ìdènà ìmọ́lẹ̀. Pẹ̀lú ìpéye tó wà ní àárín rẹ̀, àwọn ohun èlò ìṣàpẹẹrẹ ṣe pàtàkì fún ìdúróṣinṣin àti ìlọsíwájú àwọn ọkọ̀ afẹ́fẹ́.
Àwọn FOGs ń ṣiṣẹ́ lórí ipa Sagnac, níbi tí ìmọ́lẹ̀, tí ó ń rìn ní ìtọ́sọ́nà òdìkejì láàrín okùn okùn tí ń yípo, ti ń fi ìyípadà ìpele hàn tí ó bá àwọn ìyípadà ìyípadà ìyípo mu. Ìlànà onípele yìí túmọ̀ sí àwọn ìwọ̀n iyàrá onígun tí ó péye.
Awọn eroja pataki ni:
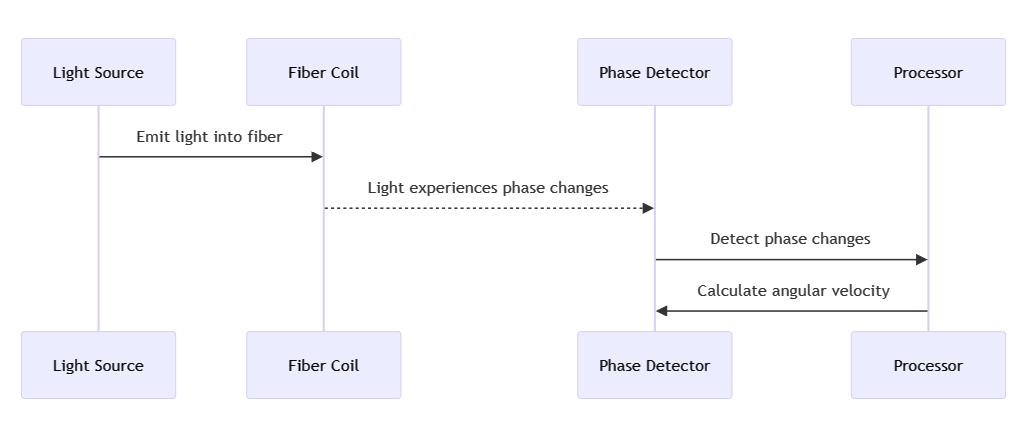
· Orísun Ìmọ́lẹ̀: Ibùdó ìbẹ̀rẹ̀, tí ó sábà máa ń jẹ́ lésà, tí ó ń bẹ̀rẹ̀ ìrìn àjò ìmọ́lẹ̀ tí ó sopọ̀ mọ́ra.
· Okun okun: Ọ̀nà ìṣàn ojú tí a fi ìlọ́po méjì ṣe, ó ń mú kí ọ̀nà ìmọ́lẹ̀ gùn sí i, èyí sì ń mú kí ipa Sagnac pọ̀ sí i.
· Olùwádìí Fọ́tò: Ẹ̀yà ara yìí ń ṣàkíyèsí àwọn ìlànà ìdènà tí ó díjú ti ìmọ́lẹ̀.
Apá Kẹta: Pàtàkì Ìparí Ìṣọ̀kan Pípa Àwọn Lílo Okùn:
Àwọn ìdènà okùn tí a fi ń pa ìṣọ̀kan (PM) Àwọn ìdènà okùn tí a fi ń pa ìṣọ̀kan (PM) jẹ́ ohun pàtàkì fún FOG, wọ́n sì ń rí i dájú pé ìmọ́lẹ̀ náà wà ní ìṣọ̀kan, èyí tí ó jẹ́ ohun pàtàkì nínú ìṣètò ìdènà. Àwọn okùn pàtàkì wọ̀nyí, tí wọ́n ń gbógun ti ìtúpalẹ̀ polarization mode, ń mú kí ìmọ̀lára FOG àti òtítọ́ dátà pọ̀ sí i (Kersey, 1996).
Yíyan àwọn okùn PM, tí a darí nípasẹ̀ àwọn àìní ìṣiṣẹ́, àwọn ànímọ́ ara, àti ìbáramu ètò, ní ipa lórí àwọn ìwọ̀n iṣẹ́ gbogbogbòò.
Apá 4: Àwọn Ohun Èlò àti Ẹ̀rí Onímọ̀-ẹ̀rọ:
Àwọn FOG àti INS rí ìfarahàn lórí onírúurú ohun èlò, láti ṣíṣètò àwọn ìrìnàjò afẹ́fẹ́ tí kò ní ènìyàn sí rírí i dájú pé wọ́n dúró ṣinṣin ní àárín àyíká tí a kò lè sọ tẹ́lẹ̀. Ẹ̀rí sí ìgbẹ́kẹ̀lé wọn ni bí wọ́n ṣe gbé wọn kalẹ̀ nínú Mars Rovers ti NASA, èyí tí ó ń mú kí ìrìnàjò afẹ́fẹ́ òde ayé rọrùn láìsí ìṣòro (Maimone, Cheng, àti Matthies, 2007).
Àwọn ìlànà ọjà ń sọ àsọtẹ́lẹ̀ ibi tí àwọn ìmọ̀-ẹ̀rọ wọ̀nyí yóò ti máa pọ̀ sí i, pẹ̀lú àwọn ohun èlò ìwádìí tí a gbé kalẹ̀ láti mú kí agbára ètò náà lágbára sí i, àwọn matrices tí ó péye, àti àwọn ìwòran tí a lè ṣe àtúnṣe (MarketsandMarkets, 2020).

Gyroscope lesa òrùka
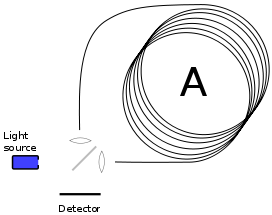
Àwòrán ti fiber-optic-gyroscope ti o da lori ipa sagnac
Àwọn ìtọ́kasí:
- Chatfield, AB, 1997.Awọn ipilẹ ti Itoju Ailewu Giga.Ìlọsíwájú nínú Àwọn Onímọ̀-ẹ̀rọ Afẹ́fẹ́ àti Àwọn Onímọ̀-ẹ̀rọ Afẹ́fẹ́, Ìdìpọ̀ 174. Reston, VA: Ilé-ẹ̀kọ́ Amẹ́ríkà fún Àwọn Onímọ̀-ẹ̀rọ Afẹ́fẹ́ àti Àwọn Onímọ̀-ẹ̀rọ Afẹ́fẹ́.
- Kersey, AD, àti àwọn ẹlòmíràn, 1996. "Fáìbà Gyros: Ọdún 20 ti Ìlọsíwájú Ìmọ̀ Ẹ̀rọ," nínúÀwọn Ìgbésẹ̀ ti IEEE,84(12), ojú ìwé 1830-1834.
- Maimone, MW, Cheng, Y., àti Matthies, L., 2007. "Odometry Awòrán Lórí Àwọn Rover Ìwádìí Mars - Ohun Èlò Láti Rí I dájú pé Ìwakọ̀ àti Àwòrán Ìmọ̀ Sáyẹ́ǹsì Pípé,"Ìwé ìròyìn IEEE Robotics & Automation,14(2), ojú ìwé 54-62.
- MarketsandMarkets, 2020. "Ọjà Ètò Ìlọsíwájú Aláìní nípa Ìpele, Ìmọ̀-ẹ̀rọ, Ìlò, Ẹ̀yà, àti Agbègbè - Àsọtẹ́lẹ̀ Àgbáyé sí 2025."
Ìkìlọ̀:
- Nípa báyìí, a kéde pé a kó àwọn àwòrán kan tí a gbé sórí ojú-òpó wẹ́ẹ̀bù wa láti inú ìkànnì ayélujára àti Wikipedia fún ète ìtẹ̀síwájú ẹ̀kọ́ àti pínpín ìwífún. A bọ̀wọ̀ fún ẹ̀tọ́ ohun-ìní ọgbọ́n ti gbogbo àwọn olùdásílẹ̀ àtilẹ̀wá. A ń lo àwọn àwòrán wọ̀nyí láìsí èrò láti èrè ìṣòwò.
- Tí o bá gbàgbọ́ pé èyíkéyìí àkóónú tí a lò rú òfin ẹ̀tọ́ àdáwò rẹ, jọ̀wọ́ kàn sí wa. A ti múra tán láti gbé àwọn ìgbésẹ̀ tó yẹ, títí kan yíyọ àwọn àwòrán kúrò tàbí fífúnni ní ìfàmọ́ra tó yẹ, láti rí i dájú pé a tẹ̀lé àwọn òfin àti ìlànà ohun ìní ọgbọ́n. Ète wa ni láti ṣe ìtọ́jú ìtàgé kan tí ó ní àkóónú tó péye, tó tọ́, tó sì bọ̀wọ̀ fún ẹ̀tọ́ ohun ìní ọgbọ́n àwọn ẹlòmíràn.
- Jọwọ kan si wa nipasẹ ọna olubasọrọ atẹle,email: sales@lumispot.cnA pinnu lati gbe igbese lẹsẹkẹsẹ nigbati a ba gba ifitonileti eyikeyi ati rii daju pe a ni ifowosowopo 100% lati yanju eyikeyi iru awọn ọran bẹẹ.
Àkókò ìfìwéránṣẹ́: Oṣù Kẹ̀wàá-18-2023